IMPLEMENTASI SISTEM DETEKSI BOLA BERBASIS COMPUTER VISION PADA NAVIGASI ROBOT SEPAK BOLA BERODA

Tujuan Penelitian :
- Membuat sistem deteksi bola berbasis computer vision yang dapat menentukan posisi bola terhadap robot.
- Menguji sistem deteksi bola berbasis computer vision pada navigasi robot sepak bola beroda.
Pembahasan :
- Open CV
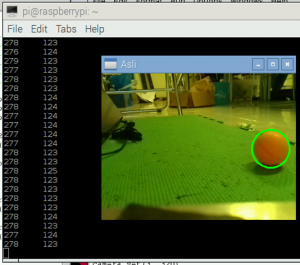
- Deteksi Bola
|
|
|

Kesimpulan :
- Sistem dapat mendeteksi dan menentukan posisi bola dengan teknik computer vision.
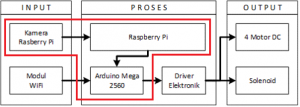
- Sistem deteksi bola dapat diimplementasikan pada sistem navigasi robot sepak bola beroda melalui antarmuka empat buah pin level tegangan.
- Robot dapat melakukan navigasi berdasarkan posisi bola yang terdeteksi.